Gallery






DARPA's Subterranean (SubT) Challenge is a global research competition focused on advancing autonomous robotic systems capable of navigating complex underground environments such as tunnels, caves, and urban infrastructure. Teams of robots are tasked with autonomously exploring unknown subterranean spaces to locate and identify artifacts, all while operating without GPS, limited communication, and extreme environmental constraints.
A critical challenge of the competition was translating this highly technical, real-time robotic progress into a clear, engaging broadcast experience. One that could communicate team performance, mission status, and scoring to both live audiences and remote viewers.
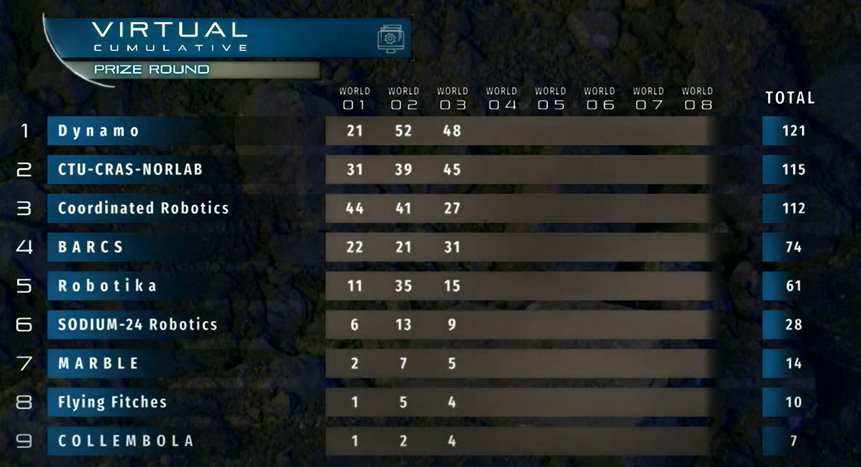
While working at Next/Now, Luke contributed to the development of a real-time broadcast graphics package that visualized live competition data from the autonomous robots. The system ingested telemetry and progress updates from the field, dynamically updating a broadcast-ready scoreboard and visual overlays that tracked team performance, artifact discovery, and mission progression in real time.
The package translated complex robotic and systems data into clear, legible visuals suitable for live broadcast and event presentation, bridging the gap between advanced autonomous research and audience-facing storytelling. The result was a responsive, data-driven broadcast system that made the SubT Challenge understandable, compelling, and engaging for both technical and non-technical audiences.
Project presented for individual portfolio purposes. ArtProject was not the contracting agency.